For the hundredth time I found myself trying to solder some small circuit board and annoyed by the way it skittered across my desk. I had tried helping hands but these are fiddly and annoying to set up, the screws keep coming loose, and they hold the boards at wonky angles. I had just about given up, so I looked on the web for some sort of PCB clamp or vice.
Over the last few years I have written and edited many Arduino sketches. Aside from a brief dalliance with Sublime Text I have exclusively used the dull but ubiquitous Arduino IDE.
At the time I started each project this seemed completely natural, but over time I seem to somehow lose track of where I put the code. I use a variety of different computers, including virtual ones, several file sharing and backup systems (Dropbox, Google Drive and Bittorrent Sync, for example) and a heap of removable media. Many of my 'important' sketches are version controlled and stored in GitHub or BitBucket. Somewhere in that lot is probably something useful for my next project, but it's getting tougher and tougher to find it.
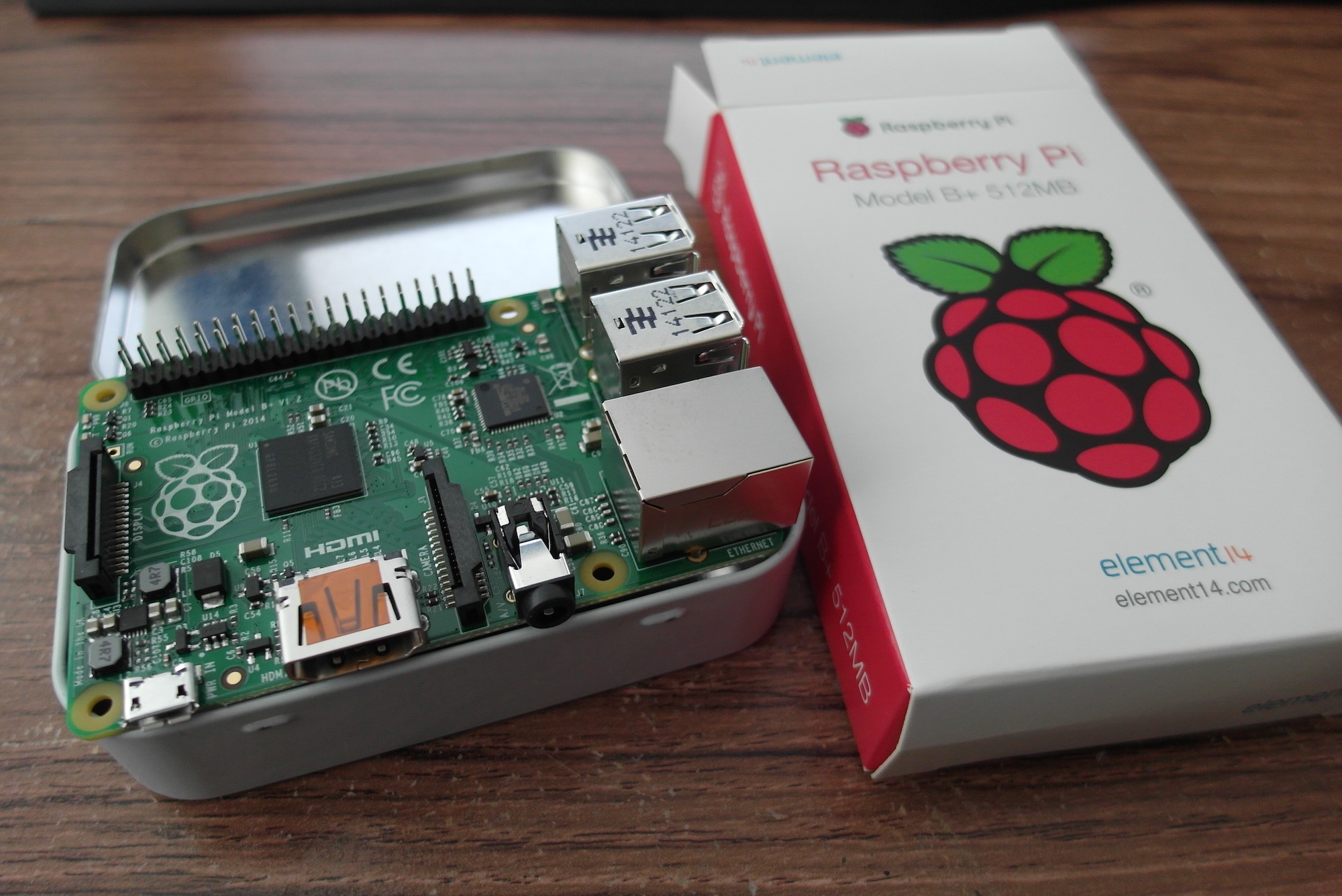
Just in case you have not noticed the hype that is all over our corner of the internet, there is a new version of the Raspberry Pi, called the "B+". I won't bother going into detail about its features, that's covered very well by many others including Adafruit, Gordon Henderson, Carrie-Ann Philbin and, of course, The Foundation.
I hope to do a bunch of stuff with this new board in the coming weeks, but for now I shall just answer one burning question:
On Thursday I popped along to the latest "Soldering irons and Software" evening with the Ipswich Makerspace" group. This was easily the best attended so far with a wide range of projects in various stages of completion. The thing I found most intriguing about the number and variety of people was how quickly we have reached a sort of "critical mass". Despite little or no pre-planning several people quickly found someone else there who was in a great position to help with their projects.
I've not blogged here for a few days. Unfortunately my "real job" got very busy. In the meanwhile I received another package of bits I had ordered from China weeks ago and mostly forgotten about ;)
Among other things in this package were some clone Arduino Mini Pro boards. These little boards have a SMD Atmega 328, crystal, LED, caps and a reset button, on a board which brings out all the inputs and outputs to 0.1" pitch. Designed for embedding in small projects, these do not have pins or sockets fitted, but the ones I ordered came with pin strips for both sides and an angled header for an end-mounted power and serial connector. I'm still astonished by the prices of these things. I got five of them for £7.77, with free postage. That's a bit over £1.50 each, no way I could even consider making one for that price.
You'd think I would be fed up with Arduinos after all that messing about with one connected to a Raspberry Pi, but while playing with that it occurred to me that some months ago I had bought a nicely cheap Arduino board kit (Xino Basic for Atmel), assembled it, but not managed to program it, so I had tossed it back in the "later" box.
My initial attempts at programming used the five-pin power and serial programming connector mounted on the edge of the board. Despite trying several serial interface boards, and as many combinations of cable connections as I could think of, I could still not get it to respond to the Arduino IDE. Since then both my skills and my collection of equipment have improved, so I reckoned it was time to have another go.
It looks like this is a good time of year for Kickstarter projects to turn up. Not only did I receive my MoPi board yesterday, but today I got three of Mike Hibbett's LPLC PIC18 development board in the post.
I must admit that I am a complete newbie when it comes to PIC development. I kind of know what a PIC is, but somehow I have managed to avoid ever working with one. When I saw this project on Kickstarter I thought I might as well give it a go. This in turn has raised a bunch of issues, though. Unlike the development boards with which I am familiar (Arduino, Freescale FRDM, Raspberry Pi and so on) there seems to be no easy way in to developing with PIC chips. It seems you need at least a hardware programmer and a specialist IDE to even get started.
A pleasant surprise today - I received two packages. One was a bunch of stuff from Cool Components, who are having a summer sale for just a few days, and had tempted me to spend more cash. I'll work through those bits another time.
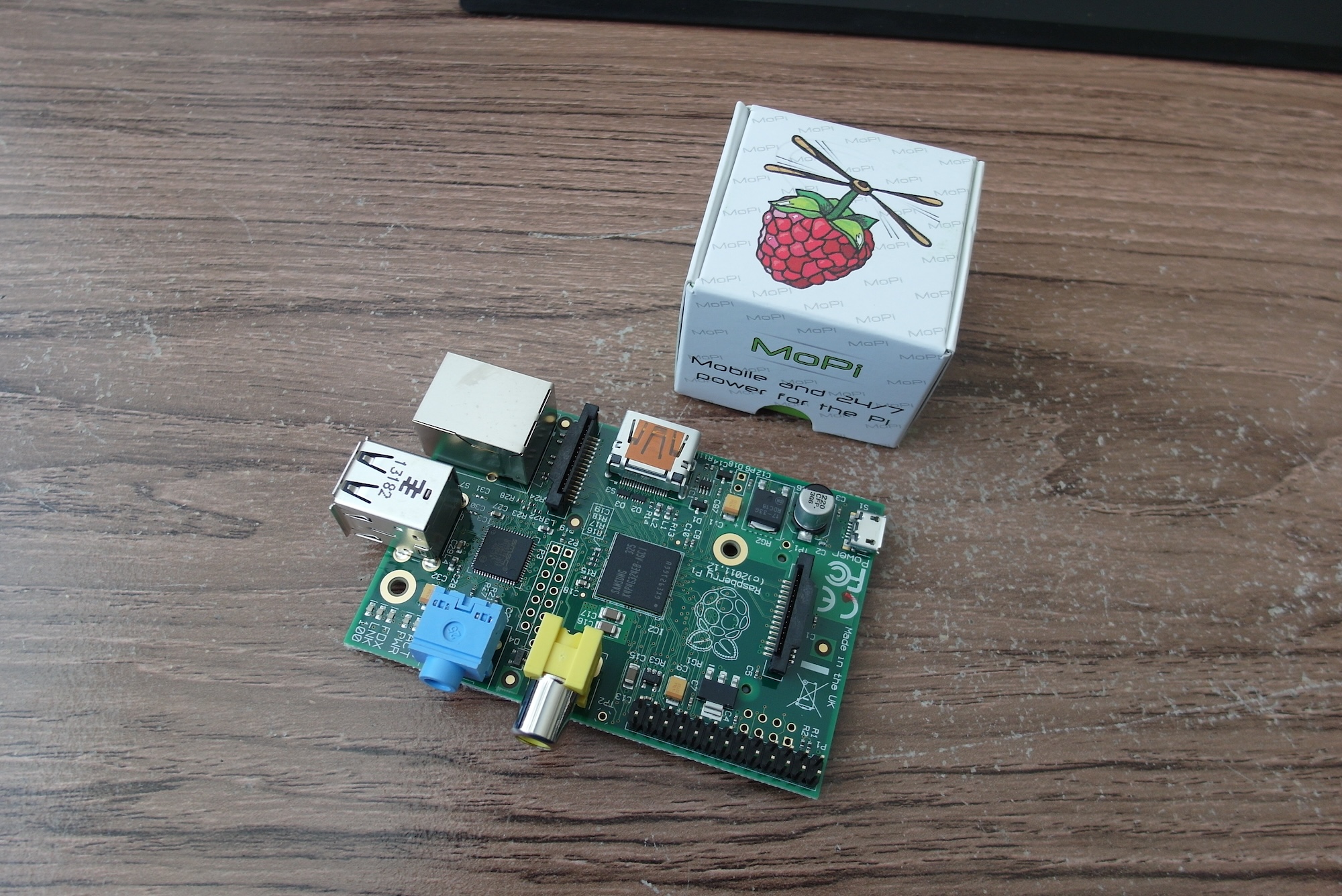
The smaller, but potentially more interesting package was the MoPi board I had backed on Kickstarter. It came in a cute little box with the flying Raspberry logo, which shows how small the board is.
I suppose it's what you get for being an early adopter, but today I received a slightly worrying email from Farnell:
Important Product Information for the Raspberry Pi Compute Module Development Kit
Replacement Display and Camera Adapter Boards
Please be aware that there is a fault with the display and camera adapter boards included as part of the Raspberry Pi Compute Module Development Kit. The adapter boards do not function correctly, and may damage the camera module when connected.